

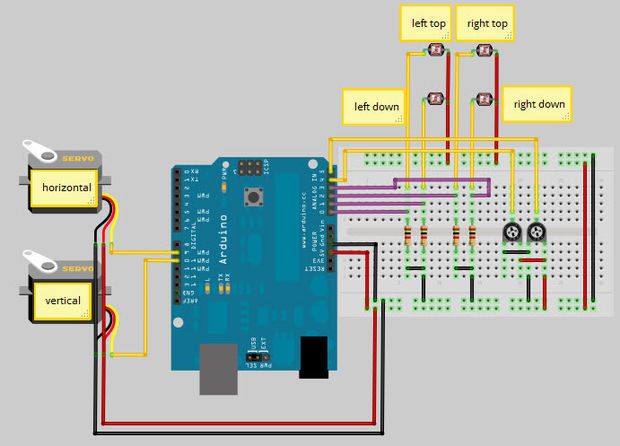
Bahan yang diperlukan:
-Arduino uno 1buah
-Resistor 10k ohm 8buah
-Jumper wires Secukupnya
-Motor servo 2buah
-LDR 5buah
-Papan bearboard 1buah
-PCB 1buah
-Penyangga 1buah
-Panel surya 1buah
https://create.arduino.cc/projecthub/nafianh/solar-tracker-a71f8e
CODING :
#include // include Servo library
// 180 horizontal MAX
Servo horizontal; // horizontal servo
int servoh = 180; // 90; // stand horizontal servo
int servohLimitHigh = 175;
int servohLimitLow = 5;
// 65 degrees MAX
Servo vertical; // vertical servo
int servov = 45; // 90; // stand vertical servo
int servovLimitHigh = 60;
int servovLimitLow = 1;
// LDR pin connections
// name = analogpin;
int ldrlt = 0; //LDR top left – BOTTOM LEFT <— BDG int ldrrt = 1; //LDR top rigt – BOTTOM RIGHT int ldrld = 2; //LDR down left – TOP LEFT int ldrrd = 3; //ldr down rigt – TOP RIGHT void setup(){ Serial.begin(9600); horizontal.attach(8); vertical.attach(9); horizontal.write(180); vertical.write(45); delay(3000); } void loop() { int lt = analogRead(ldrlt); // top left int rt = analogRead(ldrrt); // top right int ld = analogRead(ldrld); // down left int rd = analogRead(ldrrd); // down right int dtime = 10; int tol = 90; // dtime=diffirence time, tol=toleransi int avt = (lt + rt) / 2; // average value top int avd = (ld + rd) / 2; // average value down int avl = (lt + ld) / 2; // average value left int avr = (rt + rd) / 2; // average value right int dvert = avt – avd; // check the diffirence of up and down int dhoriz = avl – avr;// check the diffirence og left and rigt Serial.print(avt); Serial.print(” “); Serial.print(avd); Serial.print(” “); Serial.print(avl); Serial.print(” “); Serial.print(avr); Serial.print(” “); Serial.print(dtime); Serial.print(” “); Serial.print(tol); Serial.println(” “); if (-1*tol > dvert || dvert > tol) // check if the diffirence is in the
tolerance else change vertical angle
{
if (avt > avd)
{
servov = ++servov;
if (servov > servovLimitHigh)
{
servov = servovLimitHigh;
}
}
else if (avt < avd) { servov= –servov; if (servov < servovLimitLow) { servov = servovLimitLow; } } vertical.write(servov); } if (-1*tol > dhoriz || dhoriz > tol) // check if the diffirence is in the
tolerance else change horizontal angle
{
if (avl > avr)
{
servoh = –servoh;
if (servoh < servohLimitLow) { servoh = servohLimitLow; } } else if (avl < avr) { servoh = ++servoh; if (servoh > servohLimitHigh)
{
servoh = servohLimitHigh;
}
}
else if (avl = avr)
{
delay(5000);
}
horizontal.write(servoh);
}
Serial.print(” “);
Serial.print(servoh);
Serial.print(” “);
Serial.print(servov);
Serial.print(” “);
delay(dtime);
}
jika ada kendala bisa diskusi di : 085369237896 (mas fajar)

