

Selamat datang di panduan lengkap tentang penggunaan Sensor TCRT5000 dalam aplikasi pelacakan garis (line tracking). Artikel ini akan menjelaskan dengan detail bagaimana sensor ini bekerja dan bagaimana ia dapat diterapkan dalam proyek robot pengikut garis (line follower). Sensor TCRT5000 terkenal karena kemampuannya yang akurat dalam mendeteksi garis-garis tersebut. Kami akan membahas langkah-langkah instalasi sensor ini, prosedur pemrograman yang diperlukan, dan strateginya untuk meningkatkan kinerja robot Anda.

Berikut Merupakan Codingan Yang Telah Kami Sediakan, Telah Diuji Untuk Memastikan Keakuratan Serta Kestabilannya.
#include <Arduino.h>
int port_sensor_garis = 34;
bool baca_sensor_garis() {
int sensorValue = analogRead(port_sensor_garis);
return sensorValue < 500;
}
void setup()
{
Serial.begin(9600);
pinMode(port_sensor_garis, INPUT);
}
void loop(){
bool sensor_garis = baca_sensor_garis();
Serial.println("Garis : " + (String)sensor_garis);
}
untuk skematik, kamu bisa menggunakan gambar berikut:
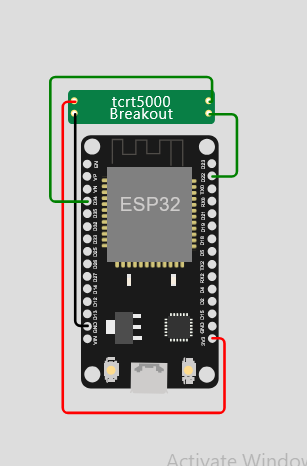
Koneksi:
- Sambungkan pin VCC dari TCRT5000 ke pin 3.3V pada ESP32.
- Sambungkan pin GND dari TCRT5000 ke pin GND pada ESP32.
- Sambungkan pin AO dari TCRT5000 ke salah satu pin digital pada ESP32 (misalnya, pin D34).
- Sambungkan pin DO dari TCRT5000 ke salah satu pin digital pada ESP32 (misalnya, pin D22).
Selamat mencoba! Semoga sukses dengan proyekmu. Jadikan setiap langkah sebagai pengalaman berharga. Salam dari Labrobotika, tempat inovasi dan kreativitas!
Jika anda berminat menggunakan jasa labrobotika, silahkan hubungi admin: WHATSAPP

