Dalam tutorial ini, kami akan membahas cara mengontrol servo motor menggunakan ESP32. Proyek ini dirancang untuk pemula yang tertarik mempelajari dasar-dasar pemrograman dan elektronika. Dengan mengikuti langkah-langkah yang sistematis, Anda akan dapat mengendalikan servo motor melalui koneksi Wi-Fi dengan mudah. Proyek ini tidak hanya bermanfaat untuk memahami konsep dasar IoT, tetapi juga dapat diterapkan dalam berbagai aplikasi praktis.
Berikut Merupakan Codingan Yang Telah Kami Sediakan, Telah Diuji Untuk Memastikan Keakuratan Serta Kestabilannya.
#include <Arduino.h>
#include <Servo.h>
Servo servo;
int port_servo = 34;
void posisi_servo(int posisi)
{
servo.write(posisi);
}
void setup()
{
Serial.begin(9600);
servo.attach(port_servo);
posisi_servo(0);
}
void loop(){
posisi_servo(0);
Serial.println("servo 0 derajat");
delay(1000);
posisi_servo(90);
Serial.println("servo 90 derajat");
delay(1000);
}
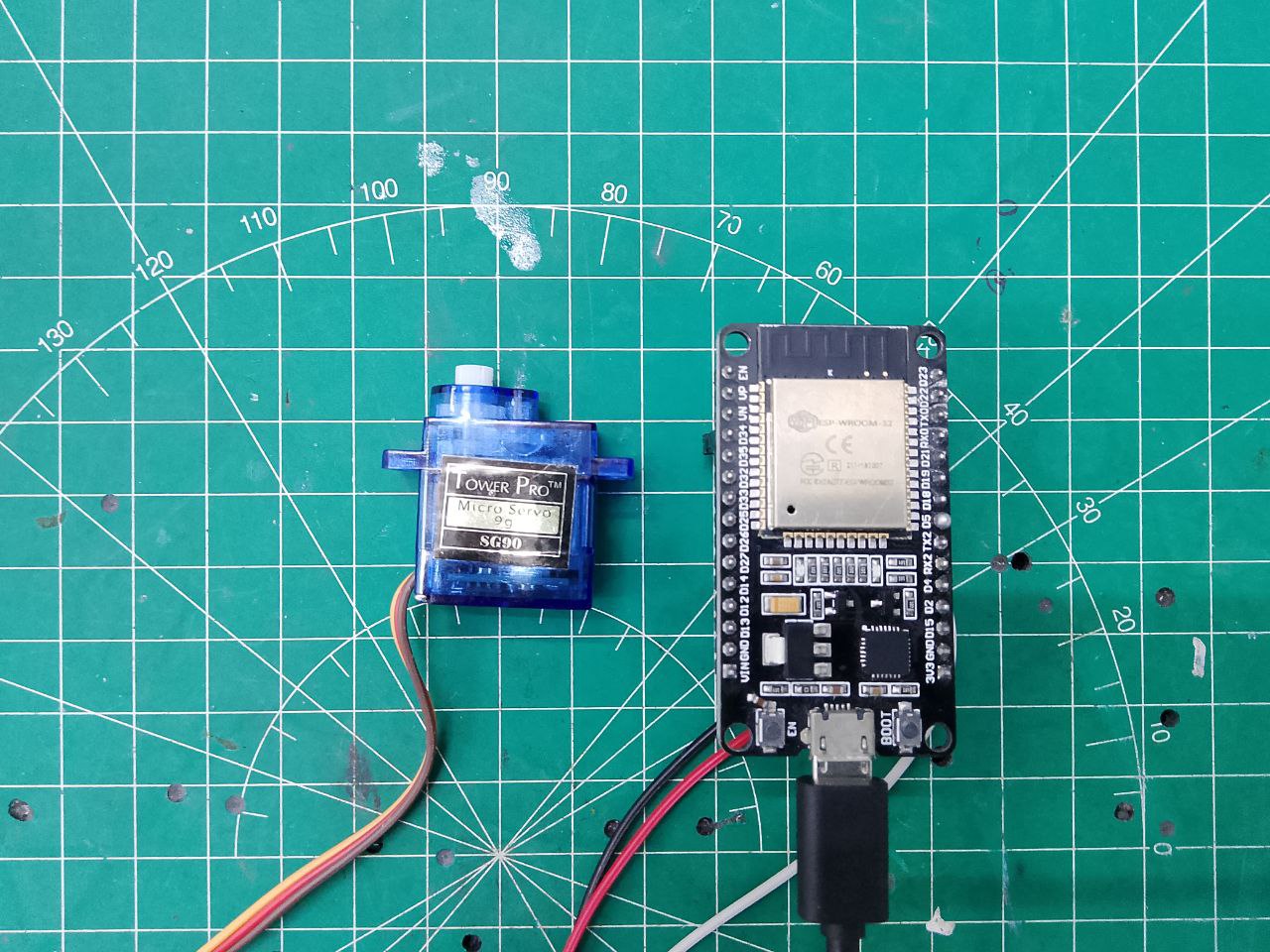
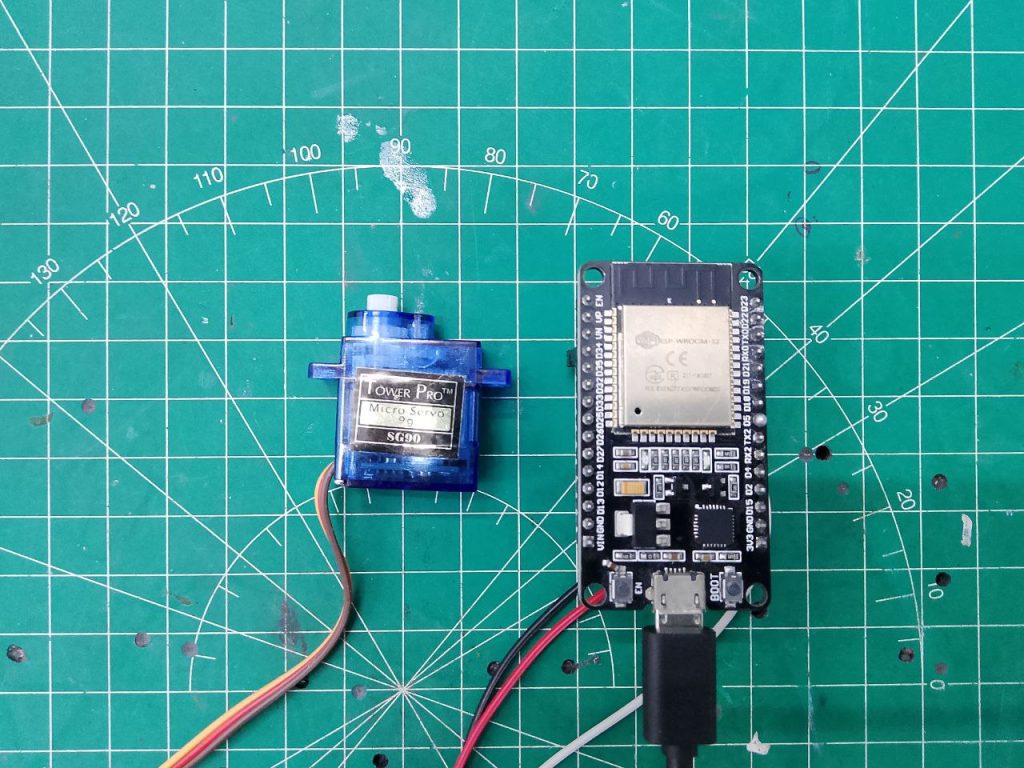
untuk skematik, kamu bisa menggunakan gambar berikut:
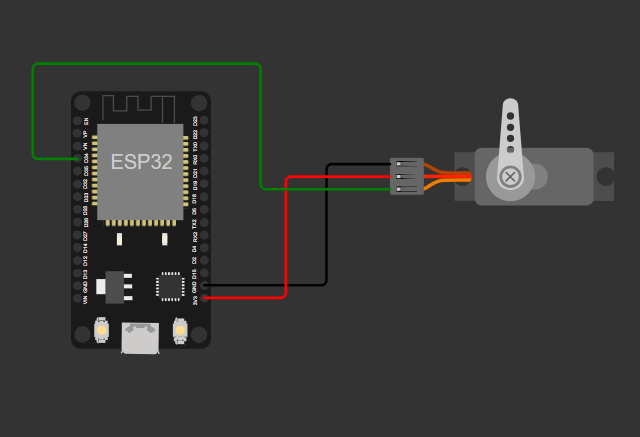
Berikut merupakan urutan Koneksi Kabel:
- VCC (Servo) → 5V (ESP32)
- GND (Servo) → GND (ESP32)
- Kontrol (Servo) → GPIO 34 (ESP32)
Untuk pengujian, kami telah melakukan uji coba ! JIKA TERTARIK Tonton video di bawah ini untuk melihat bagaimana program ini berfungsi dengan baik!
Selamat mencoba! Semoga sukses dengan proyekmu. Jadikan setiap langkah sebagai pengalaman berharga. Salam dari Labrobotika, tempat inovasi dan kreativitas!
Jika anda berminat menggunakan jasa labrobotika, silahkan hubungi admin: WHATSAPP