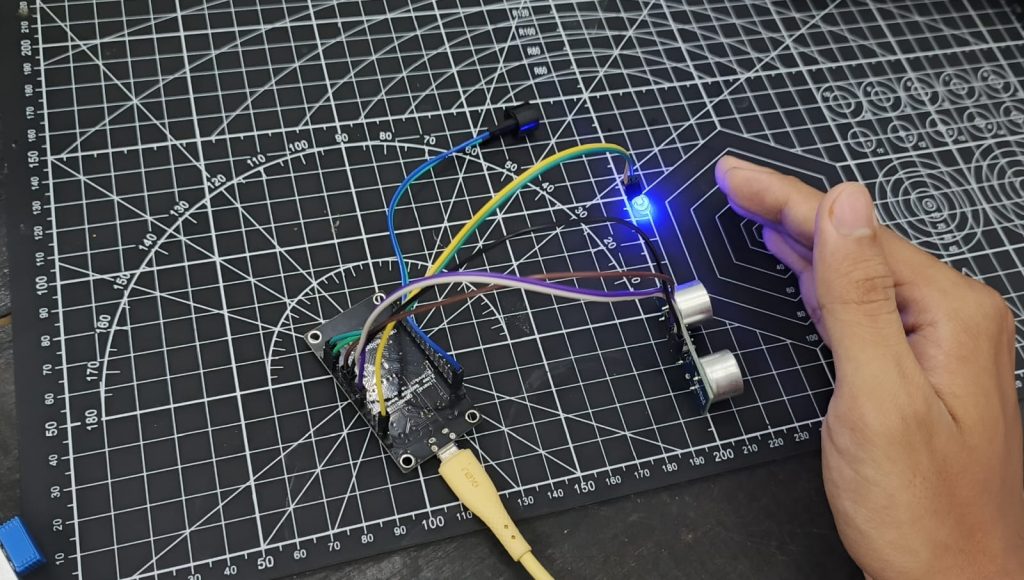
Proyek ini menggunakan ESP8266 dan sensor ultrasonik untuk mengukur jarak objek. Data jarak yang diperoleh akan dikirim ke aplikasi Blynk untuk pemantauan jarak secara real-time. Jika jarak objek kurang dari 10 cm, buzzer dan LED akan menyala sebagai tanda peringatan.
Alat yang Digunakan :
– ESP8266
– Sensor Ultrasonik (HC-SR04)
– Buzzer
– LED
– Kabel Jumper
Wiring :
Sensor Ultrasonik (HC-SR04)
VCC → 5V (ESP8266)
GND → GND (ESP8266)
TRIG → D6 (GPIO 12)
ECHO → D5 (GPIO 14)
Buzzer:
Positif (panjang) → D3
Negatif (pendek) → GND
LED:
Anoda (panjang) → D1 (GPIO 5) melalui resistor 220 Ohm
Katoda (pendek) → GND
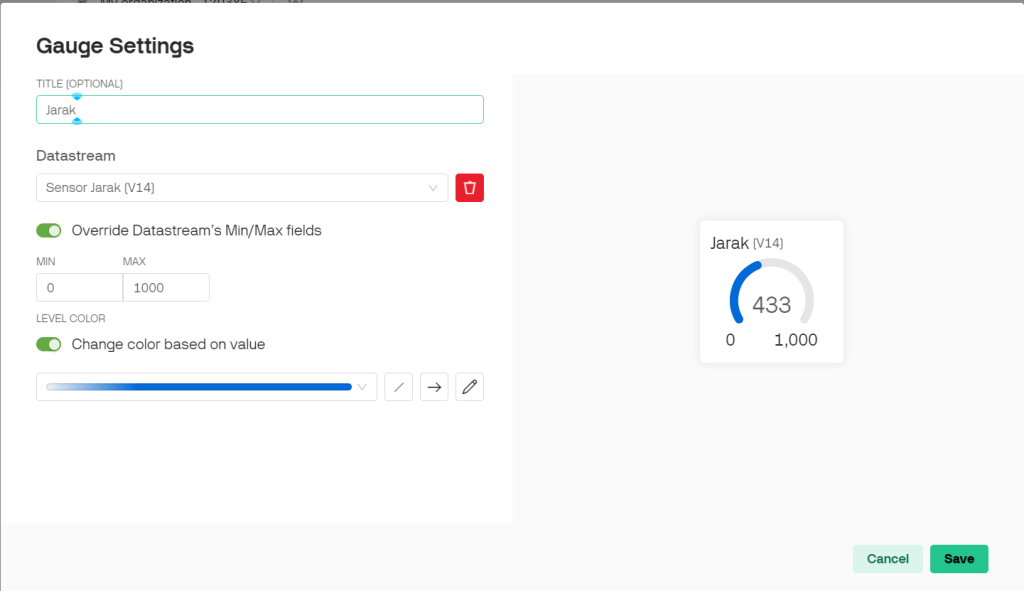
Set Up Blynk.cloud:


/*
Blynk example
You should get Auth Token in the Blynk App.
You need to write the right wifiCredentials.
*/
/* Comment this out to disable prints and save space */
#define BLYNK_TEMPLATE_ID "TMPL6w-8ZaLet"
#define BLYNK_TEMPLATE_NAME "Jarak"
#define BLYNK_AUTH_TOKEN "zZeCC0Q44S8EpFIxkqVs0Gq5hzvIvxWQ"
#define BLYNK_PRINT Serial
#include <ESP8266WiFi.h>
#include <BlynkSimpleEsp8266.h>
int trig_sensor_jarak = 12; // Trigger pin
int echo_sensor_jarak = 14; // Echo pin
int buzzer_pin = 2; // Pin untuk buzzer
int led_pin = 5; // Pin untuk LED
// You should get Auth Token in the Blynk App.
// Go to the Project Settings (nut icon).
char auth[] = "zZeCC0Q44S8EpFIxkqVs0Gq5hzvIvxWQ";
// Your WiFi credentials.
// Set password to "" for open networks.
char ssid[] = "Lab Robotika"; //nama hotspot yang digunakan
char pass[] = "lab_robotika"; //password hotspot yang digunakan
BlynkTimer timer;
void setup()
{
// Debug console
Serial.begin(9600);
pinMode(trig_sensor_jarak, OUTPUT);
pinMode(echo_sensor_jarak, INPUT);
pinMode(buzzer_pin, OUTPUT); // Set buzzer pin as output
pinMode(led_pin, OUTPUT); // Set LED pin as output
Blynk.begin(auth, ssid, pass, "blynk.cloud", 80);
timer.setInterval(1000L, sendSensor); // Send data every second
// You can also specify server:
//Blynk.begin(auth, ssid, pass, "blynk.cloud", 80);
//Blynk.begin(auth, ssid, pass, IPAddress(192,168,1,100), 8080);
}
void loop()
{
Blynk.run();
timer.run();
}
void sendSensor() {
long duration, distance;
// Clear the trigPin condition
digitalWrite(trig_sensor_jarak, LOW);
delayMicroseconds(2);
// Trigger the sensor
digitalWrite(trig_sensor_jarak, HIGH);
delayMicroseconds(10);
digitalWrite(trig_sensor_jarak, LOW);
// Read the echoPin, returns the sound wave travel time in microseconds
duration = pulseIn(echo_sensor_jarak, HIGH);
// Calculate the distance (in cm)
distance = duration * 0.034 / 2;
// Print distance to Serial Monitor
Serial.print("Distance: ");
Serial.print(distance);
Serial.println(" cm");
// Send distance data to Blynk
Blynk.virtualWrite(V14, distance); // Use V0 for a display widget in your Blynk app
// Check if distance is less than 10 cm
if (distance < 10) {
digitalWrite(buzzer_pin, HIGH); // Turn on buzzer
digitalWrite(led_pin, HIGH); // Turn on LED
Blynk.logEvent("notif_sensor");
} else {
digitalWrite(buzzer_pin, LOW); // Turn off buzzer
digitalWrite(led_pin, LOW); // Turn off LED
}
} Penulisan code pada Arduino IDE :
Hasil:

Selamat Mencoba !!
Jika anda berminat menggunakan jasa labrobotika, silahkan hubungi admin: WHATSAPP