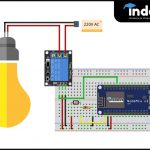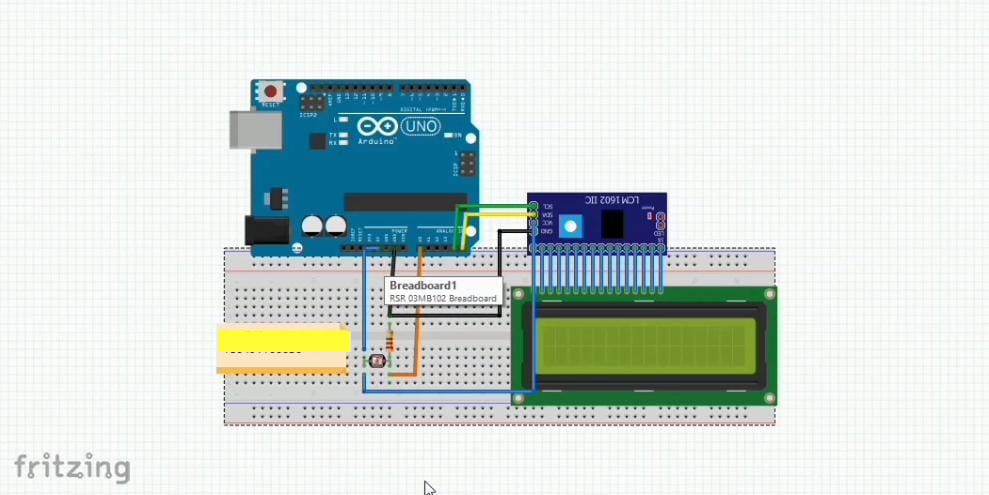
Alat dan bahan
- Arduino
- Kabel USB
- Breaboard
- Kabel Jumper
- lampu led
- Sensor LDR(sensor cahaya)
- Resistor
#include
#include
LiquidCrystal _12C lcd(0x27, 16, 2); byte AO = AO;
int nilai;
void setup() {
lcd.init();
lcd.setCursor(0,0);
lcd.print(“RIDICK INDUSTRIES. Lab Robotika”);
lcd.backlight();
delay(1000);}
void loop(){
for (int i=16; i > 4; i–) {
nilai = analogRead(AO);
lcd.setCursor(i,0);
lcd.print(“RIDICK INDUSTRIES. Lab Robotika”)
lcd.setCursor(0,1);
lcd.print(“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();}
lcd.setCursor(4,0);
lcd.print(“RIDICK INDUSTRIES. Lab Robotika”);
lcd.setCursor(0,1);
lcd.print(“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear(); {
for (int i=3; i >= 0;i==) {
nilai = analogRead(A0);
lcd.setCursor(i,0);
lcd.print(“RIDICK INDUSTRIES. Lab Robotika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();}
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“IDICK INDUSTRIES. Lab Robotika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“DICK INDUSTRIES. Lab Robotika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“ICK INDUSTRIES. Lab Robotika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“CK INDUSTRIES. Lab Robotika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“K INDUSTRIES. Lab Robotika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(” INDUSTRIES. Lab Robotika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“NDUSTRIES. Lab Robotika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“DUSTRIES. Lab Robotika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“USTRIES. Lab Robotika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“STRIES. Lab Robotika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“TRIES. Lab Robotika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“RIES. Lab Robotika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“IES. Lab Robotika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“ES. Lab Robotika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“S. Lab Robotika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“. Lab Robotika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“Lab Robotika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“ab Robotika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“b Robotika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(” Robotika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“obotika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“botika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“otika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“tika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“ika”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“ka”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
nilai = analogRead(AO);
lcd.setCursor(0,0);
lcd.print(“a”);
lcd.setCursor(0, 1);
lcd.print (“Nilai LDR: “); lcd.print(nilai);
delay(500);
lcd.clear();
lcd.setCursor(0,1);
lcd.print(“Nilai LDR; “); lcd.print(nilai);
delay(500);
lcd.clear(); }}
jika ada kendala bisa diskusi di : 085369237896 (mas fajar)